Avec ses 100 kg et ses 2m45, cette fusée effectuera fin 2023 son premier vol VTVL (Vertical Takeoff Vertical Landing). Colibri sera la première fusée hopper construite par des étudiants.
En plus de démontrer sa capacité à performer un vol VTVL, ce véhicule sera capable d'embarquer une charge utile de 3kg offrant de nombreuses opportunités de tests. Afin de répondre aux besoins du marché et de prévoir au mieux le développement de Colibri, un travail d’ingénierie système d’un semestre a été effectué dans le cadre d’un projet crédité à l’EPFL sous la supervision du Pr. Bernard Foing, scientifique français à l’ESA.
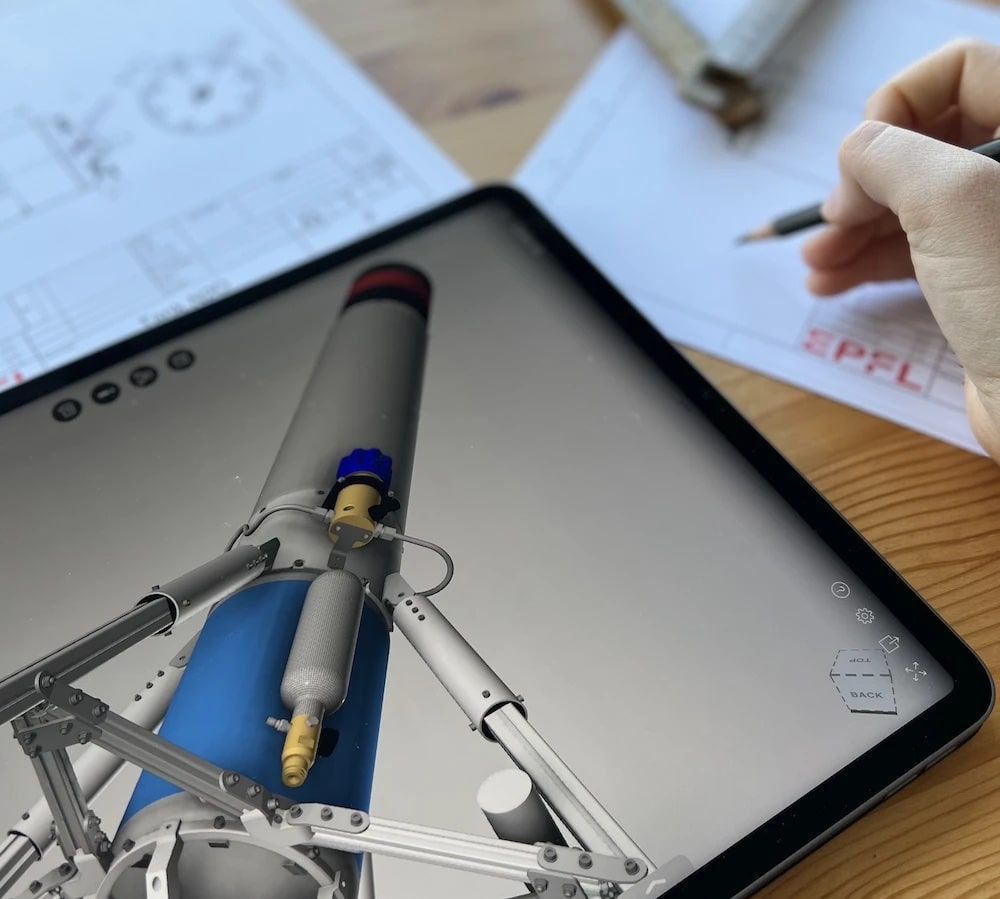
La fusée est actuellement assemblée et entame la phase d'essais des systèmes intégrés. Rendez-vous sur nos réseaux sociaux pour suivre les dernières avancées de notre projet!

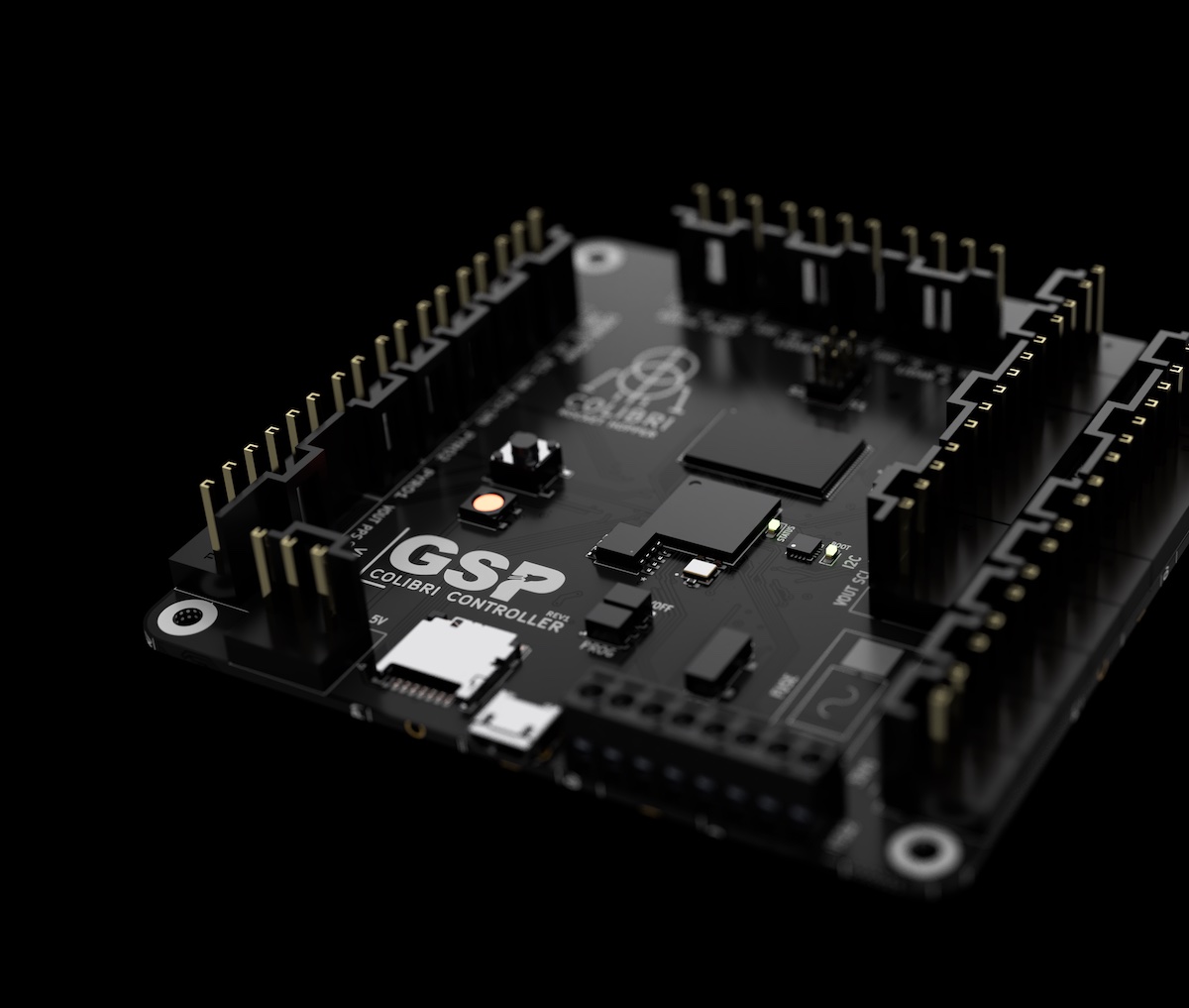
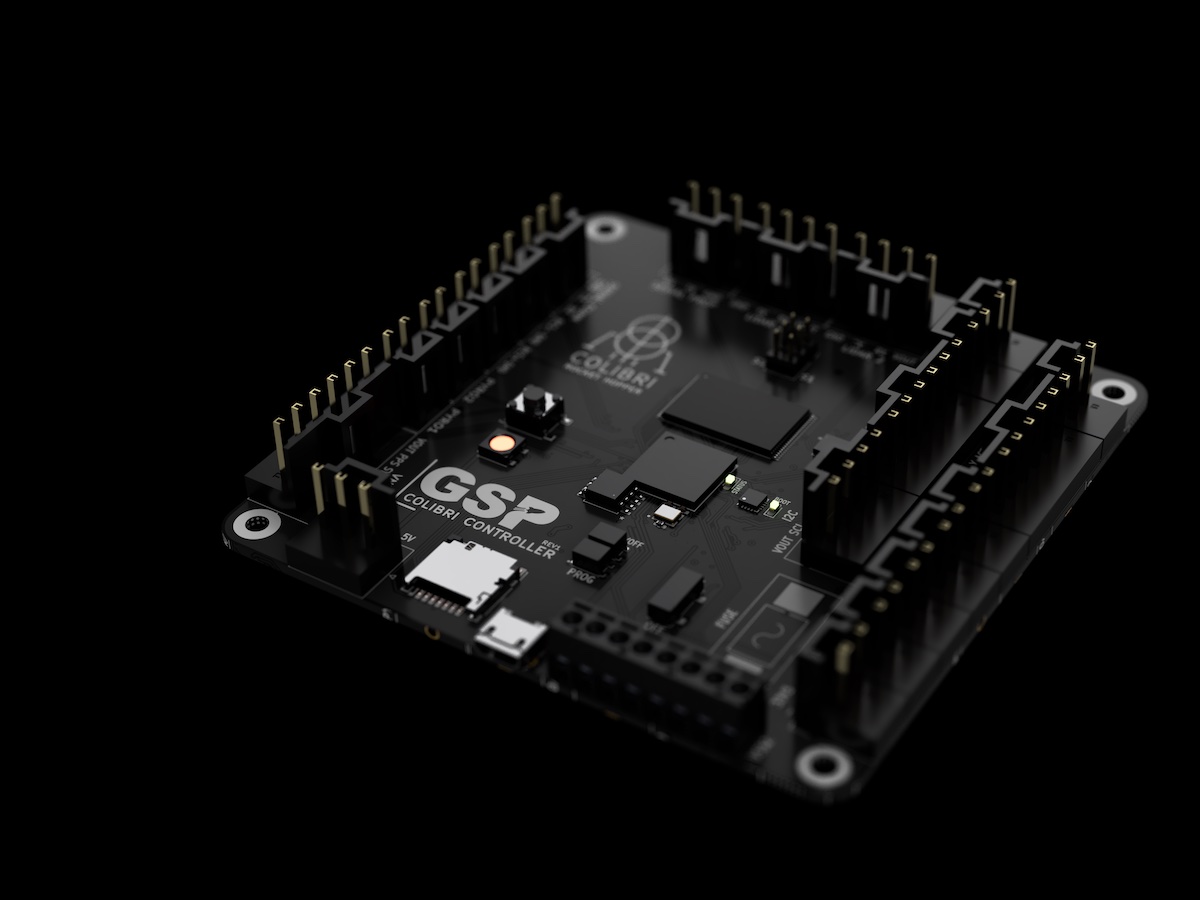
Colibri embarque 3 cartes électroniques différentes : la carte de contrôle et navigation, la carte de contrôle du moteur, et la carte de communication au sol. Ci-joint la carte de contrôle et navigation qui s'interface avec les divers capteurs et actionneurs de Colibri.
Avec ses 100 kg et ses 2m45, cette fusée effectuera fin 2023 son premier vol VTVL (Vertical Takeoff Vertical Landing). Colibri sera la première fusée hopper construite par des étudiants.
En plus de démontrer sa capacité à performer un vol VTVL, ce véhicule sera capable d'embarquer une charge utile de 3kg offrant de nombreuses opportunités de tests. Afin de répondre aux besoins du marché et de prévoir au mieux le développement de Colibri, un travail d’ingénierie système d’un semestre a été effectué dans le cadre d’un projet crédité à l’EPFL sous la supervision du Pr. Bernard Foing, scientifique français à l’ESA.


La fusée est actuellement assemblée et entame la phase d'essais des systèmes intégrés. Rendez-vous sur nos réseaux sociaux pour suivre les dernières avancées de notre projet!

Colibri embarque 3 cartes électroniques différentes : la carte de contrôle et navigation, la carte de contrôle du moteur, et la carte de communication au sol. Ci-joint un rendu de la carte de contrôle et navigation qui s'interface avec les divers capteurs et actionneurs de Colibri.